Descripción del producto
KSMIT3 es un sistema de referencia y encabezado de actitud de última generación que viene como un módulo autónomo totalmente funcional.que hace que sea fácil de integrar en cualquier sistema.
Este innovador sistema cuenta con un protocolo de comunicación completamente documentado y estándar de la industria, que permite la personalización de los mensajes de datos en términos de frecuencia, formato de salida y datos.La señal se procesa en su totalidad en el tableroEsta característica hace que KSMIT3 sea ideal para su uso en entornos operativos MCU simples.
KSMIT3 presenta una alta precisión en condiciones dinámicas con una precisión de volteo y lanzamiento de 1 grado RMS, así como una precisión de desviación de 2 grados RMS.lo que lo hace perfecto para su uso en el control y estabilización de cualquier objeto o navegación, como los drones.
Características
- AHRS de alto rendimiento en módulos de 12,1 x 12,1 mm
- Precisión de la inclinación (dinámica) 1,0 grados
- Precisión de rumbo 2.0 grados
- Requisitos extremadamente bajos para el procesador principal
- Interfaz unificada para todo el ciclo de vida del producto
- Baja potencia (45 mW a 3,0 V)
- Compatible con el PCB PLCC28 (12,1 x 12,1 x 2,6 mm)
Parámetros técnicos
| Sección 1 |
Parámetros (valores típicos) |
| La actitud exacta |
Precisión de deslizamiento (dinámica) |
2 grados (rms) |
| Precisión de rodaje / empuje (dinámica) |
1 grado (rms) |
| Las demás: |
Escala completa |
± 2000°/s |
| Estabilidad del sesgo durante el funcionamiento |
10°/h |
| No linealidad |
00,1% |
| Variación del factor de escala |
0.05% |
| G-sensibilidad |
0.1°/s/g |
| Densidad acústica |
0.01o/s/√Hz |
| Ancho de banda (-3dB) |
180 Hz |
| Acelerómetros |
Escala completa |
± 16 g |
| Estabilidad del sesgo durante el funcionamiento |
0.1 mg |
| No linealidad |
00,5% |
| Variación del factor de escala |
0.05% |
| Densidad acústica |
200 μg/√Hz |
| Ancho de banda (-3dB) |
180 |
| El número de la máquina es: |
Escala completa |
6 gauss |
| No linealidad |
00,1% |
| Resolución |
120 ugas |
| Ruido (rms) |
- ¿Qué quieres decir? |
| Interfaces |
Tensión de alimentación |
3.3v de CC |
| comunicación por puerto serie |
TTL |
| Frecuencia de salida |
Tasa de transmisión de 100hz@230400 baud |
Marcos de referencia
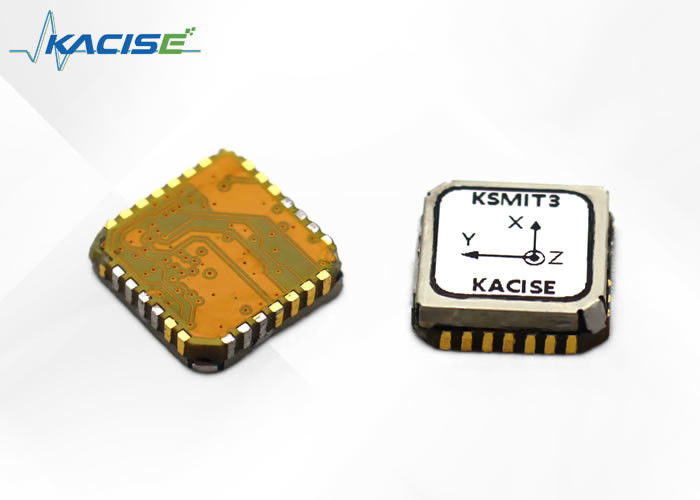
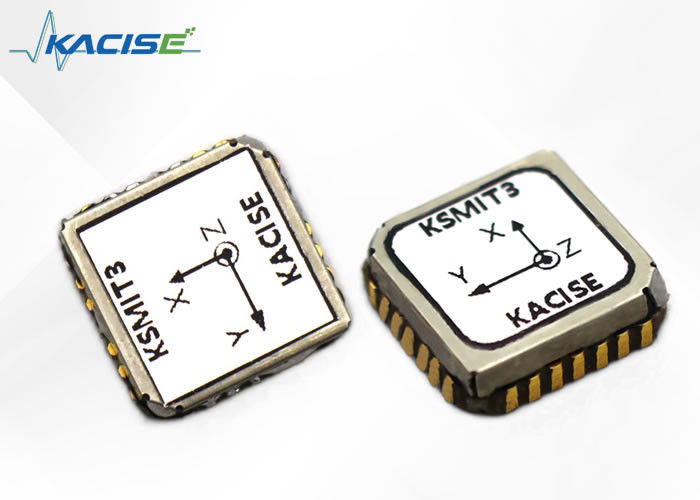
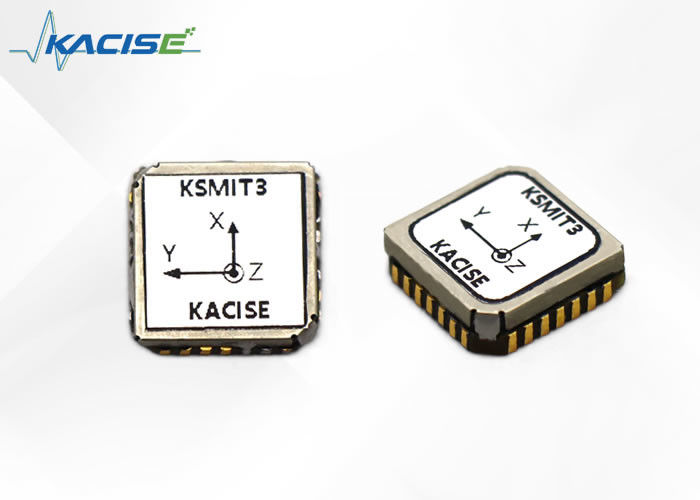
El KSMIT3 utiliza un sistema de coordenadas derecho y el marco predeterminado del sensor se define como se muestra en la Figura 13.Consulte el manual de integración de hardwareAlgunas de las salidas de datos más utilizadas con su sistema de coordenadas de referencia de salida se enumeran en la Figura 1.
 Figura 1 Sistema de coordenadas fijas del sensor predeterminado para el módulo KSMIT3
Figura 1 Sistema de coordenadas fijas del sensor predeterminado para el módulo KSMIT3
Diagrama de bloque
Figura 2:Diagrama del módulo KSMIT3
Protocolo de comunicación del usuario
La velocidad de transmisión es de 115200bps, 230400bps y 460800bps. BIT de datos 8, stop bIT 1, sin BIT de verificación. Los bytes altos vienen primero y los bytes bajos últimos..
| Número de bytes |
Nombre |
Tipo de byte |
Es muy grande.-cation |
Rango de acción |
NoSe trata de |
Descripción |
| 1 ~ 2 |
Cabecera del marco |
U,2 |
|
|
|
0XAA 71 |
| 3 |
Número de formato de marco |
Valor fijo 3=0x03 |
| 4 |
Duración del marco de comunicación |
Valor fijo 100=0x64 |
| Entre 5 y 13 |
El giroscopio |
S3*3 |
1e a 4 |
± 838.8608 |
°/s |
X/Y/Z derecha/frente/arriba |
| 14 ~ 22 años |
Acceso |
S3*3 |
1e a 5 |
± 83.88608 |
G |
X/Y/Z derecha/frente/arriba |
| Entre 23 y 28 |
Magn |
S3*2 |
1e - 2 |
± 327.68 |
UT |
X/Y/Z derecha/frente/arriba |
| 29 ~ 31 |
Hbar |
S1*3 |
1e - 2 |
± 83886.08 |
el mbar |
El barómetro |
| 32 |
Bandera de las Naciones Unidas |
U,1 |
|
|
|
BIT1-Marca válida magnética 1-Valid
BIT2-Valididad de la bandera barométrica 1-Valididad
BIT3- GPS_exist
Información GPS de salida o no
0- No hay información GPS
1- Información GPS disponible
Información BIT4-GPS Bandera válida 1- Válido
BIT5-8 Relleno cero
|
| Entre 33 y 40 |
Palabras reservadas para el sistema |
|
|
|
|
|
| 41 ~ 49 |
El número de unidad de control de velocidad |
S3*3 |
1e a 4 |
± 838.8608 |
el número de unidades |
GPS Este/Norte/Velocidad del cielo |
| Entre 50 y 60 |
Las condiciones de los sistemas de navegación |
S2*4 |
1e a 7 |
± 214.7483648 |
¿ Qué pasa? |
La longitud y la latitud del GPS |
| No puedo. |
S1*3 |
1e - 2 |
± 83886.08 |
- ¿ Qué? |
GPS AltITude |
| Entre 61 y 62 |
GPS_Mota de cabeza |
S1*2 |
1e-2 8 |
± 327.6 |
¿ Qué pasa? |
Dirección GPS |
| 63 |
Situación del GPS |
U,1 |
|
|
|
BIT1~4- Número de satélites de posicionamiento GPS (máximo 15)
BIT5 -Marca de posicionamiento GPS 1 válida
BIT6~8- Tipo de posicionamiento GPS
GPS_ Tipo fijo
0x00=No hay solución
0x01=Sólo para el cálculo de la muerte
0x02=2d Fijación
0x03=3d-fijación
0x04=Gnss+Recepción de muertos combinados
0x05=Solo tiempo para arreglar
|
| 64 ~ 65 |
GPS_Pdop |
U,2 |
1e - 2 |
|
|
|
| 66 ~ 71 años |
Ins_Att |
S2*2 |
1e - 2 |
± 327.68 |
¿ Qué pasa? |
Ptich ± 90° Rodillo ± 180° |
| S1*2 |
655.36 |
¿ Qué pasa? |
Desviación ± 180° |
| 72 ~ 80 |
Vn |
S3*3 |
1e a 4 |
± 838.8608 |
el número de unidades |
El número de unidades de producción |
| 81 ~ 89 |
- ¿ Qué? |
S2*4 |
1e a 7 |
± 214.7483648 |
¿ Qué pasa? |
La longitud y la longitud |
| S1*3 |
1e - 2 |
± 83886.08 |
- ¿ Qué? |
Altitud |
| 92 |
Modos y escenarios |
U,1 |
|
|
|
BIT1~4- Modo de trabajo
Align=1; Ins=2; Ahrs=3; Vg=4
BIT5~8- Escenario de trabajo
1=A bordo ;2=Dentro; 3=A bordo 4=Ala fija;5=Rotor
|
| 93 ~ 96 |
Reserva |
|
|
|
|
Cero relleno |
| 97 ~ 98 |
Temperatura |
S,2 |
1e - 2 |
± 327.68 |
°C |
|
| 99 |
El conde |
U,1 |
|
|
|
|
| 100 |
Código de verificación |
|
|
|
|
Suma todos los caracteres antes del BIT de verificación |
Configuración del pin
Figura 3: Configuración de pines del módulo KSMIT3 (vista superior)
| No |
Nombre |
Tipo de producto |
Descripción |
| 7 |
VDDIO |
El poder |
Tensión de alimentación digital |
| 8 |
El GND |
| 23 |
UART_RX |
Interfaz UART |
Entrada de datos del receptor |
| 24 |
UART_TX |
Interfaz UART |
Salida de datos del transmisor |
| 25 |
El GND |
| 18 |
Las condiciones de los requisitos de seguridad de los vehículos |
Interfaz GNSS auxiliar |
Entrada de datos del receptor desde el módulo GNSS |
| 19 |
UX_TX |
Interfaz GNSS auxiliar |
Salida de datos del transmisor al módulo GNSS |
| 20 |
SYNC_PPS |
Interfaz GNSS auxiliar |
Impulso por segundo de entrada del módulo GNSS |
Configuración de parámetros
El producto se encuentra por defecto en el estado de "salida continua" cuando está encendido, y para establecer los parámetros, primero se debe enviar el comando "salida de parada".el usuario debe encender y reiniciar para cambiar automáticamente al estado de transmisión continua.
1 Salida de parada
Para detener la salida, se debe cambiar el estado predeterminado de "salida continua" de la potencia al estado de "configuración de parámetros".
Enviado a: * PA espacio GS01 espacio STOP regreso del carruaje
Respuesta:
* PA espacio GS01 espacio STOP espacio 0 regreso del vagón Fallo
* Espacio PA Espacio GS01 Espacio STOP Espacio 1 regreso del carruaje Con éxito
2 Establecer escenarios de trabajo
El producto necesita cambiar los parámetros del filtro de acuerdo con diferentes escenarios de aplicación.con el escenario predeterminado a bordo para la alimentación.
El cambio de escena es para cambiar la "escena de coche" predeterminada cuando se enciende en la escena real.
Envío: * PA espacio GS01 espacio SCENES espacio 1 regreso de carruaje
Respuesta:
* PA espacio GS01 espacio SCENES espacio 1 espacio 0 regreso de carruaje Fallo
* PA espacio GS01 espacio SCENAS espacio 1 espacio 1 regreso de carruaje exitoso
Nota: Los caracteres subrayados incluyen 1 montado en automóvil, 2 en interiores, 3 montados en buques, 4 con ala fija y 5 rotores opcionales.
3 Establecer la tasa de Baud
La velocidad de transmisión predeterminada para encender es de 230400bps, que se puede cambiar enviando comandos.
Enviar: * PA espacio GS01 espacio BAUD espacio 1 regreso del vagón
Respuesta:
* PA espacio GS01 espacio BAUD espacio 1 espacio 0 regreso del carruaje Fallo
* PA espacio GS01 espacio BAUD espacio 1 espacio 1 regreso de carruaje exitoso
Nota: El contenido de los caracteres subrayados es de 1-115200bps, 2-230400bps y 3-460800bps, que son opcionales.
4 Restablecer la configuración de fábrica
La restauración de la configuración de fábrica implica establecer la escena de trabajo, el formato del marco, la velocidad de transmisión, la declinación magnética y la calibración del campo magnético en valores predeterminados.
Envío: * PA espacio GS01 espacio RESET regreso del vagón
Respuesta:
* Espacio PA Espacio GS01 Espacio RESET Espacio 0 Regreso del vagón Fracaso
*PA espacio GS01 espacio RESET espacio 1 regreso del vagón con éxito
5 Establecer el ángulo de declinación magnética
La declinación magnética predeterminada es 0, con el magnetismo positivo al noreste y el magnetismo negativo al oeste.
Enviar: * espacio PA espacio GS01 espacio MDEC espacio +/- XX.XX regreso del vagón
Respuesta:
* PA espacio GS01 espacio MDEC espacio 0 regreso del carro Fallo
* PA espacio GS01 espacio MDEC espacio 1 regreso del carruaje Con éxito
Nota: Si el ángulo de declinación magnética es de -2,5 grados, la cuerda de subrayado es de -02.50; si el ángulo de declinación magnética es de +1,5 grados, la cuerda subrayada es de +01.50.
6 Calibración del campo magnético
En el funcionamiento de los sensores magnéticos, la TI se ve inevitablemente afectada por la interferencia de los campos electromagnéticos circundantes.que puede dar lugar a diferentes grados de desviación y deformación de la intensidad del campo magnético del eje XYZ medida por el sensor magnéticoLa calibración del campo magnético es para compensar las interferencias magnéticas blandas y duras a través del aprendizaje algorITm del entorno del campo magnético circundante.Recomendamos encarecidamente que la calibración del campo magnético se implemente después de cada instalación y después de cambios en el entorno del campo magnético..
Cuando se realice la calibración del campo magnético, las sustancias interferentes circundantes deben permanecer sin cambios (es decir,La posición relativa del producto durante el proceso de rotación del producto.La calibración requiere que el operador no tenga teléfonos móviles, tarjetas magnéticas, llaves o dispositivos metálicos o de energía que puedan afectar el campo electromagnético en su cuerpo.
Atención: sólo DENTRO del rango de interferencias limitado puede la operación de calibración del campo magnético tener un efecto compensatorio.El rango del sensor magnético es aproximadamente entre más y menos 1 GaussSi el valor de interferencia del campo magnético excede más o menos 0,5 Gauss, el magnetómetro puede alcanzar el estado de saturación.que obstaculice el efecto compensatorio. Cuando la calibración falla, IT indica que se ha producido el problema.
Calibración 2D
Nota: Cuando el producto no pueda girar en 3D, se puede utilizar la calibración en 2D. Se recomienda que el ángulo de inclinación real del producto sea inferior a 5 grados.La calibración 2D se puede completar a través de la interfaz o puerto serie mediante la emisión de comandos.
1Inicio de la calibración: antes de la calibración del usuario, enviar
Envío: * espacio PA espacio GS01 espacio MCAL espacio START regreso del carruaje
Respuesta:
* PA espacio GS01 espacio MCAL espacio START espacio 0 regreso del vagón Fallo
* Espacio PA Espacio GS01 Espacio MCAL Espacio START Espacio 1 regreso de carruaje Con éxito
2 Detener la calibración: iniciar la rotación horizontal durante más de 2 vueltas, y enviar después de completar
Envío: * espacio PA espacio GS01 espacio MCAL espacio END regreso del carro
Respuesta:
* Espacio PA Espacio GS01 Espacio MCAL Espacio 0 Regreso de carruaje Fracaso
* Espacio PA Espacio GS01 Espacio MCAL Espacio 1 Espacio X: x.xx Espacio Y: y.yy Volver del vagón Con éxito
Nota: Si se devuelven resultados de calibración de 0,90 a 1, se indican buenos resultados de calibración, mientras que > 1,1 o < 0,9 indican resultados de calibración deficientes.
3. Guardar los resultados de la calibración: Después de la calibración del usuario, decidir si guardar basado en los resultados de la calibración.
Envío: * Espacio PA Espacio GS01 Espacio MCAL Espacio SAVE regreso del carro
Respuesta:
* PA espacio GS01 espacio MCAL espacio SAVE espacio 0 regreso del carruaje Fallo
* Espacio PA GS01 espacio MCAL espacio SAVE espacio 1 regreso de carruaje Con éxito
4. Resultados de calibración claros: después de la calibración, el usuario decide si desea despejar los resultados de la calibración.
Envío: * espacio PA espacio GS01 espacio MCAL espacio CLEAR regreso de transporte
Respuesta:
* Espacio PA GS01 espacio MCAL espacio CLEAR espacio 0 regreso del vagón Fallo
* Espacio PA GS01 espacio MCAL espacio CLEAR espacio 1 regreso de carruaje exitoso
Aplicaciones
Vehículos aéreos en miniatura
- Drones de entrega • Drones de vídeo • UAV agrícolas
Máquinas y aparatos
- Satcom en movimiento (SotM) • Máquinas de construcción • Monitoreo de buques
Trabajo de los robots
- Agricultura autónoma • Automatización de almacenes • Brazos robóticos
Otras aplicaciones
- Dispositivos portátiles • Navegación peatonal • VR/AR y HMDs • Ayuda a la navegación
Apoyo y servicios:
Bienvenido a nuestro servicio de soporte técnico y servicios para el sensor giroscópico. nuestro equipo dedicado está aquí para ayudarle con cualquier problema técnico o consulta que pueda tener con respecto al uso, instalación,o el mantenimiento de su sensor giroscopioNos comprometemos a proporcionarle el mejor apoyo posible para garantizar que su producto funcione de manera óptima.
Nuestro soporte incluye documentación detallada del producto, preguntas frecuentes (FAQ) y guías de problemas diseñadas para ayudarle a resolver problemas comunes rápidamente.Nuestro equipo de soporte técnico está listo para proporcionar asistencia personalizada.
Si necesita más ayuda, please refer to the 'Contact Us' section of our website (contact information excluded as per request) where you can find additional resources and support channels to get in touch with our professional technical support team.
Gracias por elegir nuestro sensor giroscopio electrónico. Esperamos servirle y asegurar el éxito de sus proyectos
Embalaje y envío:
El sensor de giroscopio electrónico está meticulosamente empaquetado en una bolsa antistatica para garantizar la protección contra la descarga electrostática (ESD).molde de espuma de alta densidadEsta espuma se coloca dentro de uncaja de cartón de marca que protege el sensor de factores ambientales y daños potenciales durante el transporte.
El exterior de la caja tiene un etiquetado claro con el nombre del producto, instrucciones de manejo y un código de barras para facilitar el seguimiento.ofreciendo una capa adicional de seguridad.
Para el envío, el sensor electrónico del giroscopio se envía a través de un servicio de mensajería de confianza para garantizar la entrega oportuna y segura.ofreciendo tranquilidad y protección para su inversiónLa información de seguimiento se proporciona tan pronto como se envía el paquete, lo que permite monitorear en tiempo real el envío hasta que llega a su destino.

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski